# Uncomment and run if using Colab!
#import urllib.request
#remote_url = 'https://gist.githubusercontent.com/gabehope/3e574b9d225004ff1a179136c29ef4d5/raw/288949bfc3b768b7603fe4decafbcd589c9a72d5/hw9_support.py'
#with urllib.request.urlopen(remote_url) as remote, open('hw9_support.py', 'w') as local:
# [local.write(str(line, encoding='utf-8')) for line in remote]Homework 9: Convolutional Neural Networks
Part 0: Enviornment Setup
This is the same as the previous homework
For this homework and for the final project, you may find it useful to run your code with access to a sufficient GPU, which may allow your code to run faster (we will talk about why later in the course). If you do not have access to a powerful GPU on your personal computer (e.g. if you primarily use a laptop), then there are 2 options you may consider for using a remotely hosted GPU.
Note that some laptops may actually run this code faster than the course server, so you may want to try it first on your laptop regardless
# This is the path that the dataset for this homework will be downloaded to.
# If you are running on the course server or Colab you can keep this line, if you are
# running on a personal computer, you may want to change this location.
from hw9_support import *
data_path = '/tmp/data'
import numpy as np
import matplotlib.pyplot as pltUsing 'cpu' device.Option 1: Use the course GPU server
We have a GPU server available for this course that you all should have access to. (If you are not a Mudd student we may need to get you setup with a Mudd CS account). The server name is teapot.cs.hmc.edu.
You can login to the server via a terminal using your hmc username and password:
ssh <USERNAME>@teapot.ssh.hmc.edu
Then run the command:
source /cs/cs152/venv/bin/activate
to activate the course Python enviornment, followed by:
jupyter lab --no-browser
to start a Jupyter server (if you want to keep a server running you can use tmux). At the end of the Jupyter startup output you should see a line like this:

This tells us the port and password we need to access the server remotely. In order to access the server we’ll start an ssh tunnel. Open a new terminal window and run the command:
ssh -L 9000:localhost:<PORT> <USERNAME>@teapot.cs.hmc.edu
Where <PORT> is the port output from JupyterLab above (8888 in the example image). 9000 is a local network port for your compute to access the server. If 9000 is in use, you can change the number to something different. Once the ssh tunnel is running you can access the notebook server by navigating to http://localhost:9000/lab in a web browser.
You can also setup VSCode to connect to this server. At the top right of the window click the kernel menu:

You should see the following popup:

Click Select another kernel, then Existing Jupyter Server and paste the address from above:

Paste the token from the Jupyter output when prompted for a password. If given multiple kernel options, select Python3. You should now be running the notebook code remotely!
Option 2: Google Colab
If you are unable to get the course server to work, another option is to use Google’s Colab service which provides a simple way to run GPU-accelerated Jupyter notebooks on the web.
To start, go to: https://colab.research.google.com/

Once you open the notebook, you’ll want to add a GPU. To do this navigate to runtime->change runtime type in the top menu.
In the popup menu select T4 GPU and click save.

Now you should be able to run the notebook! Once you’ve completed the assignment, you can download the notebook to submit it as usual.
Part 1: Convolutions
Recall from class that a convolution can be thought of as a moving dot product between a kernel vector or matrix and an input vector or matrix. (Note: technically the operation we’re defining here is a discrete cross-correlation, not a convolution, but the names are often used interchangably). In particular, a 1-dimensional convolution is an operation between an input vector \(\mathbf{x}\) and a kernel \(\mathbf{k}\), such that each entry of the output vector \(\mathbf{c}\) is defined by centering \(\mathbf{k}\) at an entry of \(\mathbf{x}\), multiplying the aligning elements and taking the sum of the results as in the following animation:

Note that without padding, we only consider locations for the kernel where every entry aligns with an entry from the input, resulting in an output that is shorter than the input.
Q1
Find the result of taking the convolution of the following input and kernel (by hand), using the approach shown above.
\[\text{Input: } \begin{bmatrix}2 & 3 & -1 & 5 & -2 \end{bmatrix}\] \[\text{Kernel: } \begin{bmatrix} 1 & 2 & 1 \end{bmatrix}\]
Answer
Find the result of taking the convolution of the following input and kernel (by hand), using the approach shown above.
\[\text{Input: } \begin{bmatrix}2 & 3 & -1 & 5 & -2 \end{bmatrix}\] \[\text{Kernel: } \begin{bmatrix} 1 & 2 & 1 \end{bmatrix}\]
Center the kernel at the first element of the input: \[2 \cdot 1 + 3 \cdot 2 + (-1) \cdot 1 = 2 + 6 - 1 = 7\]
Center the kernel at the second element of the input: \[3 \cdot 1 + (-1) \cdot 2 + 5 \cdot 1 = 3 - 2 + 5 = 6\]
Center the kernel at the third element of the input: \[(-1) \cdot 1 + 5 \cdot 2 + (-2) \cdot 1 = -1 + 10 - 2 = 7\]
The result of the convolution is: \[\begin{bmatrix} 7 & 6 & 7 \end{bmatrix}\]
Unfortunately, this notion of “centering” the kernel at each location doesn’t work if our kernel is an even size. Instead, we need a general formula. We’ll define output \(i\) of our convolution to be:
\[\text{Conv}(\mathbf{x}, \mathbf{k})_i = \sum_{j=0}^{s-1} x_{i+j} k_j\]
We’ll use the following convention for the size of the input and kernel: \[ \text{Input size: } d\] \[ \text{Kernel size: } s\]
Q2
Looking at the convolution equation above, what is the length of the output in terms of \(d\) and \(s\)? Note that without padding, the length of the output will be determined by the maximum value of \(i\), such that \(x_{i+j}\) is a valid entry of \(x\) for all terms in the summation (i.e. \(i+j \leq d\)).
Answer
The length of the output in terms of \((d)\) and \((s)\) is \((d - s + 1)\).
Q3
Complete the 1-dimensional convolution function below using the formula for the output length you just defined and the convolution formula. Do not use a convolution function from a Python library such as SciPy or PyTorch.
Feel free to use Python loops, as we won’t actually train with this implementation, so performance doesn’t matter!
Answer
def conv1d(sequence, kernel):
kernel_size = kernel.shape[0]
sequence_length = sequence.shape[0]
output_length = sequence_length - kernel_size + 1
output = np.zeros((output_length,))
for i in range(output_length):
for j in range(kernel_size):
output[i] = sequence[i+j] * kernel[j]
return outputNow we’ll try out our convolution on a sequence of data! Below, we’ll create an arbitrary input sequence and apply a kernel to it using the convolution function we just wrote. If you’re curious, try changing the kernel and see how the result changes!
# Create a domain to create our input
x = np.linspace(-5, 5, 25)
# Create an sequence
signal = np.sin(x * 1.5) + np.cos(x / 2) + np.cos(x / 1.3 + 2)
# Create a kernel for our convolution
kernel = np.array([-1, 1, -1])
# Plot the input, kernel and the result of the convolution
f, ax = plt.subplots(1, 3, figsize=(7, 2))
ax[0].plot(signal)
ax[0].set_title('Input')
ax[1].plot(kernel)
ax[1].set_title('Kernel')
ax[2].plot(conv1d(signal, kernel))
ax[2].set_title('Convolved')Text(0.5, 1.0, 'Convolved')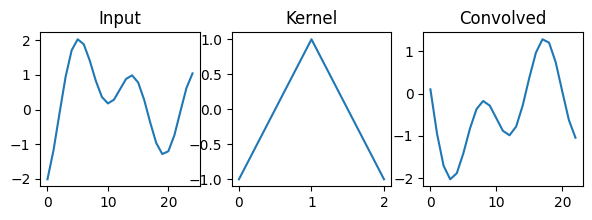
Now let’s define how to compute derivatives of convolutions. We’ll start by defining \(\mathbf{c} = \text{Conv}(\mathbf{x}, \mathbf{k})\) to be the output of our convolution and \(\frac{dL}{d\mathbf{c}}\) to be the gradient of a (scalar) loss with respect to \(\mathbf{c}\). We could compute the derivative with respect to each entry in the input \((x_{j})\) or kernel \((k_{j})\) by applying the chain rule using every entry in \(\mathbf{c}\), \((C_{i})\) and summing the results:
\[\frac{dL}{dx_{j}} = \sum_{i=0}^{d-1} \frac{dL}{dc_{i}}\frac{dc_{i}}{dx_{j}}\] \[\frac{dL}{dk_{j}} = \sum_{i=0}^{d-1} \frac{dL}{dc_{i}}\frac{dc_{i}}{dk_{j}}\]
Note that, because of the convolutional structure, each entry of the output only depends on a few entries of the input. If \(c_i\) does not depend on \(x_j\), then \(\frac{dc_i}{dx_j}\) will be 0. Consider the gradient animation we saw in class.

A more efficient way to think about computing these derivatives is to consider the gradient updates that correspond to each update of our output. If we update:
\[c_{i} \longleftarrow c_{i} + x_{i+j}\ k_{j}\] Then in our backward pass of automatic differentiation, we will need to update: \[\frac{dL}{dx_{i+j}} \longleftarrow \frac{dL}{dx_{i+j}} +\frac{dL}{dc_{i}} \frac{dc_i}{dx_{i+j}}\] \[\frac{dL}{dk_{j}} \longleftarrow \frac{dL}{dk_{j}} +\frac{dL}{dc_{i}} \frac{dc_i}{dk_{j}}\]
Q4
Modify your conv1d function to compute the gradient of the loss with respect to both the input \((\mathbf{x})\) and the kernel \((\mathbf{k})\). The function will now take an additional argument that specifies \(\frac{dL}{d\mathbf{c}}\), the gradient of the loss \((L)\) with respect the output of the convolution \((\mathbf{c})\).
Hint: If you used loops to implement conv1d you can keep the same structure, each time you would update an entry of the output \(\mathbf{c}\), update the appropriate entries of \(\frac{dL}{dx_{i+j}}\) and \(\frac{dL}{dk_{j}}\) instead as shown above.
Answer
def conv1d_backward(sequence, kernel, dloss_doutput):
kernel_size = kernel.shape[0]
sequence_length = sequence.shape[0]
output_length = dloss_doutput.shape[0]
dloss_dsequence = np.zeros_like(sequence)
dloss_dkernel = np.zeros_like(kernel)
for i in range(output_length):
for j in range(kernel_size):
dloss_dsequence[i+j] += dloss_doutput[i] * kernel[j]
dloss_dkernel[j] += dloss_doutput[i] * kernel[j]
return dloss_dsequence, dloss_dkernelA 2-dimensional convolution generalizes the idea of a convolution to matrices, as shown in the following animation (credit).

In this case we assume both the input \(\mathbf{X}\) and kernel \(\mathbf{K}\) are matricies of size \((d \times e)\) and \((s \times s)\) respectively: \[\text{Input }\mathbf{X}: d \times e \text{ matrix}\] \[\text{Kernel }\mathbf{K}: s \times s \text{ matrix}\]
Note: we’re assuming for simplcity that \(\mathbf{K}\) is square, but this need not be the case in general.
In this case, we move our 2-dimensional kernel to every possible location in the input and once again multiply corresponding elements, taking the sum. We can summarize this in a similar equation:
\[\text{Conv}(\mathbf{X}, \mathbf{K})_{r,c} = \sum_{i=0}^{s-1}\sum_{j=0}^{s-1} X_{r+i,c+j}\ K_{i,j}\]
Q5
Complete the following implementation of a 2-dimensional convolution. using the equation above. As before, you’ll need to determine the correct output size first.
Once again, performance doesn’t matter here
Answer
def conv2d(image, kernel):
kernel_size = kernel.shape[0]
image_height, image_width = image.shape[0], image.shape[1]
output_height = image_height - kernel_size + 1 # YOUR CODE HERE
output_width = image_width - kernel_size + 1 # YOUR CODE HERE
output = np.zeros((output_height, output_width))
for r in range(output_height):
for c in range(output_width):
for i in range(kernel_size):
for j in range(kernel_size):
output[r, c] += image[r+i, c+j] * kernel[i, j]
return outputLet’s try out our conv2d function on an image. As we’ve used in previous homeworks, we can use PyTorch to load a variety of real datasets. For image datasets, these are available in the torchvision library. We can download the MNIST dataset of number images that we’ve used before with the following code:
import torchvision
data = torchvision.datasets.MNIST(data_path, # Specify where to store the data
download=True, # Whether to download the data if we don't have it
train=True # Download the training set (False will download the validation set)
)
print(data[0])(<PIL.Image.Image image mode=L size=28x28 at 0x317661700>, 5)We see that in the above if we take an observation from this dataset we get a tuple of an image and a corresponding label. The image is given as an object from the Pillow library (PIL).
data[0][0]
We can convert Pillow images to torch tensors using a torchvision.transforms.ToTensor object, or we can pass such an object directly to the dataset class to transform our data automatically.
# Create a transform object
transform = torchvision.transforms.ToTensor()
# Apply the transform to the first image in the dataset (ignoring the label)
image = transform(data[0][0])
print('Converted image type:', type(image))
# Give the transform directly to the MNIST object
data = torchvision.datasets.MNIST(data_path, transform=transform)
print('Automatically converted image type:', type(data[0][0]))
print('Image shape:', data[0][0].shape)Converted image type: <class 'torch.Tensor'>
Automatically converted image type: <class 'torch.Tensor'>
Image shape: torch.Size([1, 28, 28])If we look at the shape of an image, we see that it has height and width dimensions, but also an extra dimension. This is the color channel dimension. Since these are greyscale images with only a single color channel we’ll get rid of it for now.
# Take just the height and width dimensions of our image
image = data[0][0][0]
image.shapetorch.Size([28, 28])Fianlly let’s apply a few different kernels to the image and visualize the results.
# Create an edge detection kernel
kernel = np.array([[ 1, 1, 1],
[ 0, 0, 0],
[-1, -1, -1]])
# Create the axes for our plots
f, ax = plt.subplots(2, 4, figsize=(8, 4))
ax[0, 0].imshow(image, cmap='Greys_r')
ax[0, 0].set_title('Image')
# Apply our convolution and plot the result
output = conv2d(image, kernel)
ax[0, 1].imshow(output, cmap='Greys_r')
ax[0, 1].set_title('Vertical edges')
ax[1, 1].imshow(kernel, cmap='Greys_r')
# Apply our transposed convolution and plot the result
output = conv2d(image, kernel.T)
ax[0, 2].imshow(output, cmap='Greys_r')
ax[0, 2].set_title('Horizontal edges')
ax[1, 2].imshow(kernel.T, cmap='Greys_r')
# Apply a kernel of all 1s to blur the image
output = conv2d(image, np.ones_like(kernel))
ax[0, 3].imshow(output, cmap='Greys_r')
ax[0, 3].set_title('Blur')
ax[1, 3].imshow(np.ones_like(kernel), cmap='Greys_r')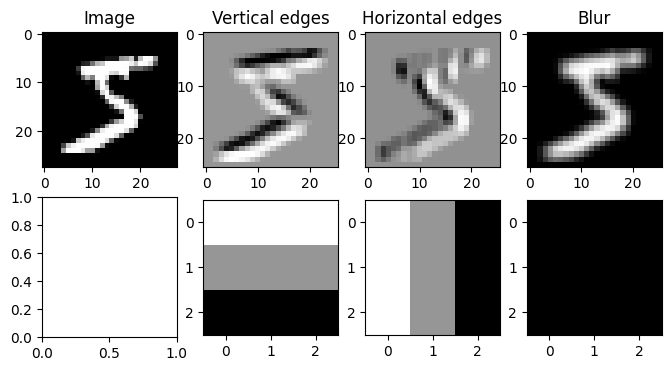
As we saw in class, a common extension to convolutions is to pad the input with zeros before applying the convolution operation. This allows for outputs that match the size of the input even for large kernels. In the 1-dimensional case, a convolution with padding can be visualized as follows:

In the 2-dimensional case, it can be visualized as:

Q6
Modify your conv2d function to take an additional argument padding that specifies the number of 0s to add before the first element and after the last element of each dimension before applying the convolution. For example: \[\text{Padding = 1: }\quad \begin{bmatrix} 2 & 5 \\ -1 & 3 \end{bmatrix} \longrightarrow \begin{bmatrix} 0 & 0 & 0 & 0 \\ 0 & 2 & 5 & 0 \\ 0 & -1 & 3 & 0 \\ 0 & 0 & 0 & 0 \\\end{bmatrix} \] \[\text{Padding = 2: }\quad \begin{bmatrix} 2 & 5 \\ -1 & 3 \end{bmatrix} \longrightarrow \begin{bmatrix}0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 2 & 5 & 0 & 0 \\ 0 & 0 & -1 & 3 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0\end{bmatrix} \]
Hint: Make sure to account for the change in the output shape!
Answer
def conv2d(image, kernel, padding=0):
kernel_size = kernel.shape[0]
image_height, image_width = image.shape[0], image.shape[1]
output_height = image_height - kernel_size + 1 + 2 * padding # YOUR CODE HERE
output_width = image_width - kernel_size + 1 + 2 * padding # YOUR CODE HERE
output = np.zeros((output_height, output_width))
for r in range(output_height):
for c in range(output_width):
for i in range(kernel_size):
for j in range(kernel_size):
if r+i - padding > 0 and r+i - padding < image_height and \
c+j - padding > 0 and c+j - padding < image_width:
output[r, c] += image[r+i - padding, c+j - padding] * kernel[i, j]
return outputLet’s visualize the same convolution with and without padding.
# Create an edge detection kernel
kernel = np.array([[ 1, 1, 1],
[ 0, 0, 0],
[-1, -1, -1]])
# Take just the height and width dimensions of our image
image = data[0][0][0]
# Create the axes for our plots
f, ax = plt.subplots(1, 3,)
ax[0].imshow(image, cmap='Greys_r')
ax[0].set_title('Image')
# Apply our convolution with no padding and plot the result
output_0 = conv2d(image, kernel, padding=0)
ax[1].imshow(output_0, cmap='Greys_r')
ax[1].set_title('Padding=0')
# Apply our convolution with a padding of 10 and plot the result
output_10 = conv2d(image, kernel, padding=10)
ax[2].imshow(output_10, cmap='Greys_r')
ax[2].set_title('Padding=10')Text(0.5, 1.0, 'Padding=10')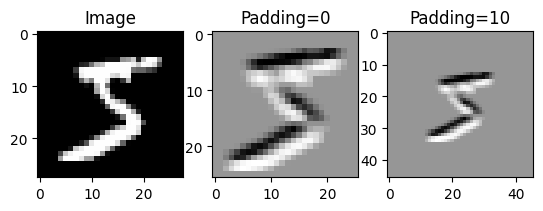
While it is convinient to think of images as being matrices, as we’ve seen, color images actually have 3 values at each location! A red value, a green value as a blue value as shown below. We call these the color channels.
import PIL # Pillow
# Load an image
image = np.array(PIL.Image.open('astronaut.jpg'))[..., :3]
# If you're in Colab, you can use the commented line below to load the same image.
#image = (skimage.transform.resize(skimage.data.astronaut(), (128, 128, 3)) * 255).astype(int)
# Plot the color image
f, ax = plt.subplots(1, 4, figsize=(8, 3))
ax[0].imshow(image)
ax[0].set_title('Image')
# Plot each color channel separately
ax[1].imshow(image[..., 0], cmap='Greys_r')
ax[1].set_title('Red channel')
ax[2].imshow(image[..., 1], cmap='Greys_r')
ax[2].set_title('Green channel')
ax[3].imshow(image[..., 2], cmap='Greys_r')
ax[3].set_title('Blue channel')Text(0.5, 1.0, 'Blue channel')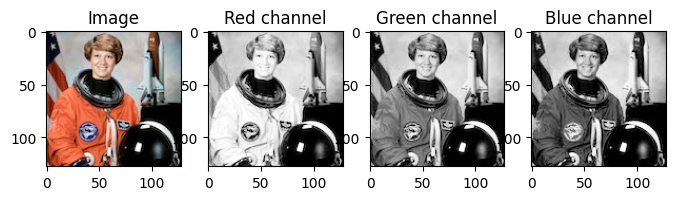
In PyTorch, we’ll represent an image with multiple channels as a \(\text{Channels (c)} \times \text{Height (h)} \times \text{Width (w)}\) tensor. Note: this is different from many other libraries, which put the channel dimension last!. We therefore have a vector, rather than a scalar at each position in the image.
For a 2-dimensional convolution applied to an image with multiple channels, our kernel will also need to have a matching number of channels. In this case, at each step of our convolution, we’ll compute a dot product between two channel vectors rather than two scalars.
\[\text{Conv}(\mathbf{X}, \mathbf{K})_{r,c} = \sum_{i=0}^{s-1}\sum_{j=0}^{s-1}\sum_{l=0}^{c-1} X_{l, r+i,c+j}\ K_{l, i,j} = \sum_{i=0}^{s-1}\sum_{j=0}^{s-1} X_{:, r+i,c+j}^T\ K_{:, i,j}\]
The following animation shown what this looks like for a 1-dimensional convolution.

Q7
Modify your (original or padded) conv2d function to accept 2 3-dimensional tensors with the following shapes:
\[\text{Input: }\quad \text{Channels (c)} \times \text{Height (h)} \times \text{Width (w)}\] \[\text{Kernel: }\quad \text{Channels (c)} \times \text{Size (s)} \times \text{Size (s)}\]
The result should be a 2-dimensional matrix, such that each entry follows the equation above.
Answer
def conv2d(image, kernel, padding=0):
kernel_size = kernel.shape[-1]
channels, image_height, image_width = image.shape[0], image.shape[1], image.shape[2]
output_height = image_height - kernel_size + 1 + 2 * padding # YOUR CODE HERE
output_width = image_width - kernel_size + 1 + 2 * padding # YOUR CODE HERE
output = np.zeros((output_height, output_width))
for r in range(output_height):
for c in range(output_width):
for i in range(kernel_size):
for j in range(kernel_size):
if r+i - padding > 0 and r+i - padding < image_height and \
c+j - padding > 0 and c+j - padding < image_width:
for k in range(channels):
output[r, c] += image[k, r+i - padding, c+j - padding] * kernel[k, i, j]
return outputLet’s try applying using our convolution function on a color image! Below we’ll load an image using the Python Pillow library and use our function to compute a convolution, using an edge detection kernel.
import PIL # Pillow
# Create an edge detection kernel
kernel = np.array([[ 1, 1, 1],
[ 0, 0, 0],
[-1, -1, -1]])
# Repeat it for the red, green and blue channels
kernel_vertical = np.stack([kernel, kernel, kernel])
# Create a transposed version as well
kernel_horizontal = np.stack([kernel.T, kernel.T, kernel.T])
# Load an image and convert it to a numpy array
image = np.array(PIL.Image.open('astronaut.jpg'))[..., :3]
# Create the axes for our plots
f, ax = plt.subplots(1, 4, figsize=(8, 3))
ax[0].imshow(image)
# Convert our image from (height x width x channels) to (channels x height x width)
image = image.transpose(2, 0, 1)
# Apply our convolution and plot the result
output_vertical = conv2d(image, kernel_vertical)
ax[1].imshow(output_vertical, cmap='Greys_r')
# Apply our transposed convolution and plot the result
output_horizontal = conv2d(image, kernel_horizontal)
ax[2].imshow(output_horizontal, cmap='Greys_r')
# Apply a averaging (blur) kernel
output_mean = conv2d(image, np.ones_like(kernel_horizontal))
ax[3].imshow(output_mean, cmap='Greys_r')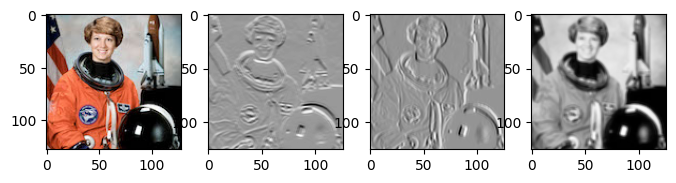
Typically we want to compute several convolutions at once, such that our output also has multiple channels, as illustrated below in 1 dimension. (For a 2-dimensional visualization, check out this website)

We will typically also want to be able to apply our convolutions to multiple inputs at once, as in a batch. For this reason the Conv2d function in PyTorch actually expects 2 4-dimensional tensors with the following structure:
\[\text{Input: }\quad \text{Observations (N)} \times \text{Channels (c)} \times \text{Height (h)} \times \text{Width (w)}\] \[\text{Kernel: }\quad \text{Output channels (o)} \times \text{Channels (c)} \times \text{Size (s)} \times \text{Size (s)}\]
In this case, at each corresponding location between our input and kernel, we will multiply an \(N \times c\) input matrix with the transpose of a \(o \times c\) weight matrix to produce an \(N \times o\) matrix. In total our result will have the following shape:
\[\text{Output: }\quad \text{Observations (N)} \times \text{Output channels (o)} \times \text{Output height (h)} \times \text{Output width (w)}\]
We can define each entry of the output with the following equation:
\[\text{Conv}(\mathbf{X}, \mathbf{K})_{n,k,r,c} = \sum_{i=0}^{s-1}\sum_{j=0}^{s-1}\sum_{l=0}^{c-1} X_{n,l, r+i,c+j}\ K_{k, l, i,j}\]
Q8
Implement a new version of conv2d that takes in a 4-dimension input array and a 4-dimensional kernel array and computes the (batched) convolution function described above.
Answer
def conv2d(image, kernel, padding=0):
kernel_size = kernel.shape[-1]
output_channels = kernel.shape[0]
N, channels, image_height, image_width = image.shape[0], image.shape[1], image.shape[2], image.shape[3]
output_height = image_height - kernel_size + 1 + 2 * padding # YOUR CODE HERE
output_width = image_width - kernel_size + 1 + 2 * padding # YOUR CODE HERE
output = np.zeros((N, output_channels, output_height, output_width))
for n in range(N):
for r in range(output_height):
for c in range(output_width):
for i in range(kernel_size):
for j in range(kernel_size):
if r+i - padding > 0 and r+i - padding < image_height and \
c+j - padding > 0 and c+j - padding < image_width:
for k in range(channels):
for o in range(output_channels):
output[n, o, r, c] += image[n, k, r+i - padding, c+j - padding] * kernel[o, k, i, j]
return outputPyTorch provides a convinient way to load batches of images from a dataset via the DataLoader class. The dataloader will automatically group images and labels into tensors for us!
from torch.utils.data import DataLoader
loader = DataLoader(data, # The dataset
batch_size=8, # The batch size
shuffle=True, # Tell PyTorch to randomize the order of the data
)
for batch in loader:
images, labels = batch
print('Image batch shape:', images.shape)
print('Label batch shape:', labels.shape)
breakImage batch shape: torch.Size([8, 1, 28, 28])
Label batch shape: torch.Size([8])Now we can try applying 3 kernels to a batch of data simultaniously.
# Create an edge detection kernel
kernel = np.array([[ 1, 1, 1],
[ 0, 0, 0],
[-1, -1, -1]])
# Repeat it for the red, green and blue channels
kernel_vertical = np.stack([kernel])
# Create a transposed version as well
kernel_horizontal = np.stack([kernel.T])
# Create a blur kernel
kernel_blur = np.ones_like(kernel_horizontal)
# Put all 3 kernels together into a single array
kernel = np.stack([kernel_vertical, kernel_horizontal, kernel_blur])
output = conv2d(images, kernel)
# Create the axes for our plots
f, ax = plt.subplots(1, 5, figsize=(10, 3))
ax[0].imshow(images[0][0], cmap='Greys_r')
ax[0].set_title('Image')
# Plot the result of the first kernel
ax[1].imshow(output[0][0], cmap='Greys_r')
ax[1].set_title('Kernel 1')
# Plot the result of the second kernel
ax[2].imshow(output[0][1], cmap='Greys_r')
ax[2].set_title('Kernel 2')
# Plot the result of the third kernel
ax[3].imshow(output[0][2], cmap='Greys_r')
ax[3].set_title('Kernel 3')
# Plot the result of all three kernels as the rgb channels of an image
full_output = output[0].transpose(1, 2, 0)
full_output = full_output - full_output.min()
full_output = full_output / full_output.max()
ax[4].imshow(full_output)
ax[4].set_title('All kernels')Text(0.5, 1.0, 'All kernels')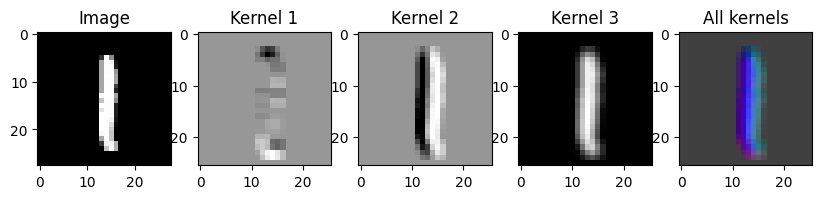
Part 2: CNNs in PyTorch
The nn module from PyTorch includes built-in support for convolutional layers that we can use in the same way that we would use nn.Linear layers. In particular the nn.Conv2d layer will perform 2-dimensional convolutions over an image input. nn.Conv2d expects the input to have the 4-dimensional shape we introduced above:
\[\text{Input: }\quad \text{Observations (N)} \times \text{Channels (c)} \times \text{Height (h)} \times \text{Width (w)}\]
A simple implementation of the nn.Conv2d module might look something like this:
import torch
from torch import nn
import torch.nn.functional as F
class Conv2D(nn.Module):
def __init__(self, in_dimensions, out_dimensions, kernel_size):
super().__init__()
# Create a kernel (weight) parameter and a bias parameter
self.kernel = nn.Parameter(torch.randn(out_dimensions, in_dimensions, kernel_size, kernel_size) / np.sqrt(in_dimensions))
self.bias = nn.Parameter(torch.zeros((1, out_dimensions, 1, 1)))
def forward(self, x):
# The PyTorch equivalent of the conv2d function we wrote!
print(x.shape, self.kernel.shape, self.bias.shape)
return F.conv2d(x, self.kernel) + self.biasWe can use it as we would any other layer, as long as we give it the right input shape. Here we’ll load an image into PyTorch and apply a very simple random convolution to it.
output = Conv2D(1, 3, 3)(images)
# Convert to numpy
output = output.detach().numpy()
# Create the axes for our plots
f, ax = plt.subplots(1, 5, figsize=(10, 3))
ax[0].imshow(images[0][0], cmap='Greys_r')
ax[0].set_title('Image')
# Plot the result of the first kernel
ax[1].imshow(output[0][0], cmap='Greys_r')
ax[1].set_title('Kernel 1')
# Plot the result of the second kernel
ax[2].imshow(output[0][1], cmap='Greys_r')
ax[2].set_title('Kernel 2')
# Plot the result of the third kernel
ax[3].imshow(output[0][2], cmap='Greys_r')
ax[3].set_title('Kernel 3')
# Plot the result of all three kernels as the rgb channels of an image
full_output = output[0].transpose(1, 2, 0)
full_output = full_output - full_output.min()
full_output = full_output / full_output.max()
ax[4].imshow(full_output)
ax[4].set_title('All kernels')torch.Size([8, 1, 28, 28]) torch.Size([3, 1, 3, 3]) torch.Size([1, 3, 1, 1])Text(0.5, 1.0, 'All kernels')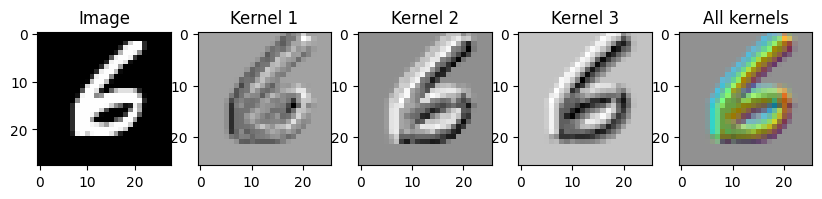
Another important layer that we’ll need for convolutional neural networks is the max-pooling layer. Recall that max-pooling is similar to a convolution, but rather than taking a dot product between a kernel and a window of the input, we simply take the maximum value in the window of an input. In the 1-dimensional case this looks like:

1-dimension max-pooling with a stride of 1 could be implemented as:
def maxpool1d(sequence, pool_size=3):
sequence_length = sequence.shape[0]
output_length = sequence_length - pool_size + 1
output = np.ones((output_length,)) * -np.inf
for i in range(output_length):
for k in range(pool_size):
output[i] = np.maximum(output[i], sequence[i + k])
return outputRecall that the stride of a pooling (or convolutional) layer specifies to take only 1 in every stride outputs. We can use this to subsample our sequence or image, producing a lower resolution version as shown below in 1-dimension.

Q9
Modify the maxpool1d function above to take a stride argument. For example, if the output of a maxpool is: \[\text{Output (stride 1): }\begin{bmatrix}5 & 1 & 7 & 4 & 3 & 8 & 2 & 9 & 6 \end{bmatrix}\] Then the output with stride = 2 should be: \[\text{Output (stride 2): }\begin{bmatrix}5 & 7 & 3 & 2 & 6 \end{bmatrix}\] In gerneal the length of the output should be: \(\text{Size} \longrightarrow \big\lfloor\frac{\text{Size}}{\text{Stride}} \big\rfloor\)
Answer
def maxpool1d(sequence, pool_size=3, stride=1):
sequence_length = sequence.shape[0]
output_length = (sequence_length - pool_size + 1) // stride
output = np.ones((output_length,)) * -np.inf
for i in range(output_length):
for k in range(pool_size):
output[i] = np.maximum(output[i], sequence[i * stride + k])
return outputIn PyTorch we can use the nn.MaxPool2D layer to perform max-pooling within a neural network. We can perform the similar average pooling operation using nn.AvgPool2D. Average pooling simply takes the average over a window rather than the max. Below we show how to use both layers to lower the resolution of an image.
# Create the axes for our plots
f, ax = plt.subplots(1, 5, figsize=(10, 3))
ax[0].imshow(images[0][0], cmap='Greys_r')
ax[0].set_title('Image')
# Plot the result of the first kernel
ax[1].imshow(nn.MaxPool2d(2, 1)(images)[0][0], cmap='Greys_r')
ax[1].set_title('Maxpool\n size=2, stride=1')
# Plot the result of the first kernel
ax[2].imshow(nn.MaxPool2d(2, 2)(images)[0][0], cmap='Greys_r')
ax[2].set_title('Maxpool\n size=2, stride=2')
# Plot the result of the first kernel
ax[3].imshow(nn.AvgPool2d(2, 1)(images)[0][0], cmap='Greys_r')
ax[3].set_title('Avgpool\n size=2, stride=1')
# Plot the result of the first kernel
ax[4].imshow(nn.AvgPool2d(2, 2)(images)[0][0], cmap='Greys_r')
ax[4].set_title('Avgpool\n size=2, stride=2')Text(0.5, 1.0, 'Avgpool\n size=2, stride=2')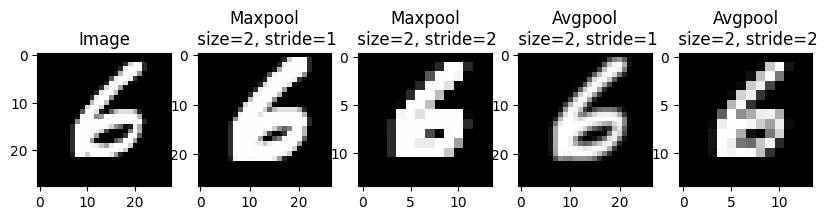
The final new useful layer we’ll introduce is the flatten layer, which is implemented in nn.Flatten. This layer takes in a 4-dimensional batch of images and flattens it into 2-dimensional matrix.
\[\text{Input: }\quad \text{Observations (N)} \times \text{Channels (c)} \times \text{Height (h)} \times \text{Width (w)}\] \[ \longrightarrow \text{Output: }\quad \text{Observations (N)} \times \text{Total features } (chw)\]
We can implement a simple version of this layer as follows:
class Flatten(nn.Module):
def __init__(self):
super().__init__()
def forward(self, x):
return x.reshape(x.shape[:-3] + (-1,))
print('Shape of image batch:', images.shape)
print('Shape of flattened batch:', Flatten()(images).shape)Shape of image batch: torch.Size([8, 1, 28, 28])
Shape of flattened batch: torch.Size([8, 784])This flatten layer allows us to use nn.Linear layers following our convolutional layers.
We can now put everything together to make a very simple convolutional network with a single convolutional layer and a single linear layer:
model = nn.Sequential(
nn.Conv2d(1, 6, 5, padding=2), # Convolutional layer with 1 input channel, 6 output channels and a kernel size of 5
nn.Tanh(), # Tanh activation function
nn.AvgPool2d(2, 2), # Average pooling with a pool size of 2 and a stride of 2
nn.Flatten(), # Flatten the output of AvgPool. to be batch x 1176
nn.Linear(1176, 10), # Final linear layer to predict 1 of 10 classes.
)We’ll use the provided run_model function (from the last homework) to train and evaluate this model on the FashionMNIST dataset.
run_model(data_path, model)
[ 1/10] Train Loss = 0.5264; Valid Loss = 0.2897; Valid Accuracy = 91.6%
[ 2/10] Train Loss = 0.2806; Valid Loss = 0.2442; Valid Accuracy = 92.9%
[ 3/10] Train Loss = 0.2337; Valid Loss = 0.2054; Valid Accuracy = 94.0%
[ 4/10] Train Loss = 0.2003; Valid Loss = 0.1833; Valid Accuracy = 94.5%
[ 5/10] Train Loss = 0.1737; Valid Loss = 0.1537; Valid Accuracy = 95.4%
[ 6/10] Train Loss = 0.1542; Valid Loss = 0.1401; Valid Accuracy = 96.1%
[ 7/10] Train Loss = 0.1369; Valid Loss = 0.1259; Valid Accuracy = 96.2%
[ 8/10] Train Loss = 0.1239; Valid Loss = 0.1151; Valid Accuracy = 96.7%
[ 9/10] Train Loss = 0.1121; Valid Loss = 0.1062; Valid Accuracy = 96.7%
[10/10] Train Loss = 0.1038; Valid Loss = 0.0981; Valid Accuracy = 97.0%
[10/10] Train Loss = 0.1038; Valid Loss = 0.0981; Valid Accuracy = 97.0%As we saw in class, often convolutional neural network architectures are presented as diagrams that specify the size and number of convolutions at each layer. Below is a diagram describing one of the most famous convolutional neural network archtectures: LeNet-5 (named after on of it’s inventors Yann LeCun).

Q10
Implement a version of the LeNet-5 architecture shown above. Note that there are some crucial details missing from the figure, such as: the activation function to use and what kind of subsampling to use. Feel free to make your own choices for these. For activations you could use nn.Tanh or nn.ReLU. For subsampling you could use nn.MaxPool2d or nn.AvgPool2d with appropriate strides.
A few details to note:
- The size of our inputs is 28x28, not the 32x32 in the figure above, you’ll need this information to compute the appropriate number of inputs for the first linear layer.
- The kernel size is 5 for both convolutional layers.
- “Subsampling” is a pooling and/or stride not an additional convolution.
- In order to get the resolutions correct with a 28x28 input, you’ll need to use
padding="same"in the first convolutional layer andpadding="valid"in the second.
Answer
model = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5, padding='same'), # First convolutional layer
nn.Tanh(), # Activation function
nn.AvgPool2d(kernel_size=2, stride=2), # Subsampling layer
nn.Conv2d(6, 16, kernel_size=5, padding='valid'), # Second convolutional layer
nn.Tanh(), # Activation function
nn.AvgPool2d(kernel_size=2, stride=2), # Subsampling layer
nn.Flatten(), # Flatten the output
nn.Linear(16 * 5 * 5, 120), # First fully connected layer
nn.Tanh(), # Activation function
nn.Linear(120, 84), # Second fully connected layer
nn.Tanh(), # Activation function
nn.Linear(84, 10) # Output layer
)
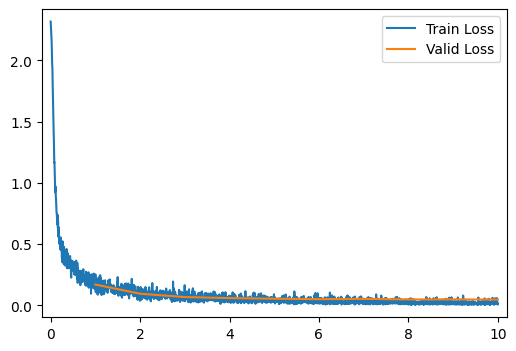
run_model(data_path, model)
0.00% [0/10 00:00<?]
0.00% [0/235 00:00<?]
[10/10] Train Loss = 0.0208; Valid Loss = 0.0416; Valid Accuracy = 98.7%Q11
Now let’s visualize a bit of what our network is doing.
Complete the code below to visualize both each of the 6 filters applied by the first convolutional layer of the model and each of the 6 channels of the output of the first layer.
Answer
# Create the axes for our plots
f, ax = plt.subplots(2, 6, figsize=(12, 4))
# We're using a nn.Sequential model, so we can access the first layer as follows
layer = model[0]
transformed = layer(images)
for r in range(6):
ax[0, r].imshow(layer.weight.detach().numpy()[r][0], cmap='bwr')
ax[0, r].axis('off')
ax[1, r].imshow(transformed.detach().numpy()[0][r], cmap='bwr')
ax[1, r].axis('off')
ax[0, 0].set_title('Kernel')
ax[1, 0].set_title('Output')Text(0.5, 1.0, 'Output')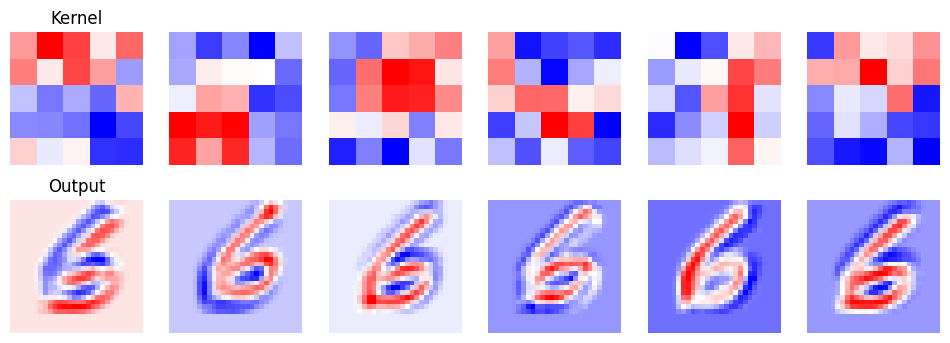
Q12
Modify the network you just created such that the validation accuracy is as high as possible (ideally above 99%). You may need to experiment a bit to find a network that works. Feel free to change the activations, the number and size of layers and the pooling. You may also use other layers that we’ve learned about, such as: nn.Dropout and nn.BatchNorm2d.
If your LeNet-5 implementation already achieved over 99% accuracy, try to improve on its accuracy by a little. If it takes more than a few minutes to achieve over 99% accuracy, just make a note of what you tried and the best accuracy you got!
Answer
improved_model = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5, padding='same'), # First convolutional layer
nn.Tanh(), # Activation function
nn.AvgPool2d(kernel_size=2, stride=2), # Subsampling layer
nn.Conv2d(6, 16, kernel_size=5, padding='valid'), # Second convolutional layer
nn.Tanh(), # Activation function
nn.AvgPool2d(kernel_size=2, stride=2), # Subsampling layer
nn.Flatten(), # Flatten the output
nn.Linear(16 * 5 * 5, 120), # First fully connected layer
nn.Tanh(), # Activation function
nn.Linear(120, 84), # Second fully connected layer
nn.Tanh(), # Activation function
nn.Linear(84, 10) # Output layer
)
run_model(data_path, improved_model)
[ 1/10] Train Loss = 0.4758; Valid Loss = 0.1701; Valid Accuracy = 95.0%
[ 2/10] Train Loss = 0.1339; Valid Loss = 0.0954; Valid Accuracy = 97.0%
[ 3/10] Train Loss = 0.0837; Valid Loss = 0.0681; Valid Accuracy = 97.7%
[ 4/10] Train Loss = 0.0618; Valid Loss = 0.0597; Valid Accuracy = 98.1%
[ 5/10] Train Loss = 0.0475; Valid Loss = 0.0545; Valid Accuracy = 98.2%
[ 6/10] Train Loss = 0.0397; Valid Loss = 0.0507; Valid Accuracy = 98.4%
[ 7/10] Train Loss = 0.0327; Valid Loss = 0.0531; Valid Accuracy = 98.4%
[ 8/10] Train Loss = 0.0294; Valid Loss = 0.0488; Valid Accuracy = 98.3%
[ 9/10] Train Loss = 0.0233; Valid Loss = 0.0491; Valid Accuracy = 98.4%
[10/10] Train Loss = 0.0206; Valid Loss = 0.0478; Valid Accuracy = 98.4%
[10/10] Train Loss = 0.0206; Valid Loss = 0.0478; Valid Accuracy = 98.4%Part 3: Autoencoders
As we’ve seen in class, an autoencoder is a special kind of neural network that is trained to output its input (or some modification of its input). Traditionally this network is split into 2 halves: an encoder that outputs a low-dimensional representation of the input, and a decoder that takes this low-dimensional representation and scales it back up to the original input size.
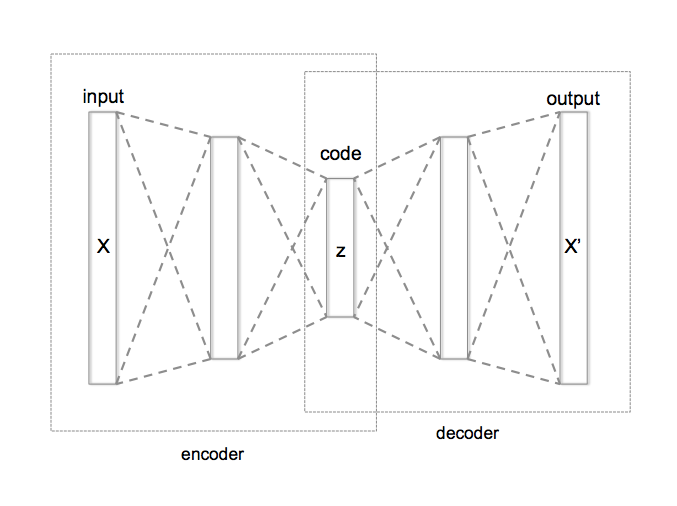
from Wikipedia
Because at the midpoint of the network we need to represent the entire input with a low-dimensional representation, we have what’s known as an information bottleneck, that is, our decoded output can only make use of information that passes through this bottleneck. This makes autoencoders useful for compression, as if we have the decoder, we can approximately reconstruct any input from only the much smaller bottleneck representation.
Let’s construct our own autoencoder! We’ll start by reusing our LeNet network as our encoder, so our bottleneck dimension will be \(10\). Feel free to make modifications to it for this section.
encoder = modelQ13
Construct a decoder network that takes in a 10-dimensional input and outputs a \(1 \times 28 \times 28\) image tensor. As a starting point, you should follow the same architecture as LeNet-5, but in reverse as shown below.
This means you’ll need to (approximately) invert layers such as convolutions, average pooling and flattening. You can use the following substitutions going from your encoder to your decoder:
nn.Conv2d\(\rightarrow\)nn.ConvTranspose2dornn.Conv2dwith paddingnn.AvgPool2d\(\rightarrow\)nn.Upsamplenn.Flatten\(\rightarrow\)nn.Unflatten
Answer
decoder = nn.Sequential(
nn.Linear(10, 84),
nn.Tanh(),
nn.Linear(84, 120),
nn.Tanh(),
nn.Linear(120, 400),
nn.Tanh(),
nn.Unflatten(1, (16, 5, 5)),
nn.Upsample(scale_factor=2, mode='nearest'),
nn.ConvTranspose2d(16, 6, kernel_size=5, padding=0),
nn.Tanh(),
nn.Upsample(scale_factor=2, mode='nearest'),
nn.ConvTranspose2d(6, 1, kernel_size=5, padding=2),
)For convinience, we’ll create an autoencoder model that lets us combine the encoder and decoder in to one object.
class Autoencoder(nn.Module):
def __init__(self, encoder, decoder):
super().__init__()
self.encoder = encoder
self.decoder = decoder
def forward(self, X):
return self.decoder(self.encoder(X))
ae_model = Autoencoder(encoder, decoder)Now in order to train our model, we’ll need to write some code for our training step. In this case we’ll train our autoencoder with either per-pixel mean squared error loss or a per-pixel mean absolute error loss :
\[\text{MSELoss}(X, w) = \sum_{i=1}^N \sum_{j=1}^c \sum_{k=1}^h \sum_{l=1}^w \big( AE_w(X)_{ijkl} - X_{ijkl} \big)^2\]
\[\text{MAELoss}(X, w) = \sum_{i=1}^N \sum_{j=1}^c \sum_{k=1}^h \sum_{l=1}^w \big| AE_w(X)_{ijkl} - X_{ijkl} \big|\]
All those summantions might look scary, but all we’re doing is an element-wise operation between two tensors followed by a summation!
Q14
Complete the following function that takes in a model, an input image batch tensor, and a vector of labels (that we can ignore), and returns both the output from the autoencoder and the pixel-wise mean squared error loss.
Answer
def autoencoder_output_and_mseloss(model, X, y):
'''
Inputs:
model: nn.Module, an autoencoder model.
X: tensor (float), an N x C x H x W tensor of images
y: tensor (float), an N x classes tensor of labels (unused)
Outputs:
output: tensor (float), an N x C x H x W tensor of reconstructed images.
loss: float, the mean squared error loss between the input and reconstructions.
'''
output = model(X)
loss = torch.mean((output - X) ** 2)
return output, lossNow complete the following function that takes in a model, an input image batch tensor, and a vector of labels (that we can ignore), and returns both the output from the autoencoder and the pixel-wise mean absolute error loss.
def autoencoder_output_and_maeloss(model, X, y):
'''
Inputs:
model: nn.Module, an autoencoder model.
X: tensor (float), an N x C x H x W tensor of images
y: tensor (float), an N x classes tensor of labels (unused)
Outputs:
output: tensor (float), an N x C x H x W tensor of reconstructed images.
loss: float, the mean squared error loss between the input and reconstructions.
'''
output = model(X)
loss = torch.mean(torch.abs(output - X))
return output, lossWith either of these functions, we should now be able to train an autoencoder! (the run_model function accepts a function like this for computing the loss in training).
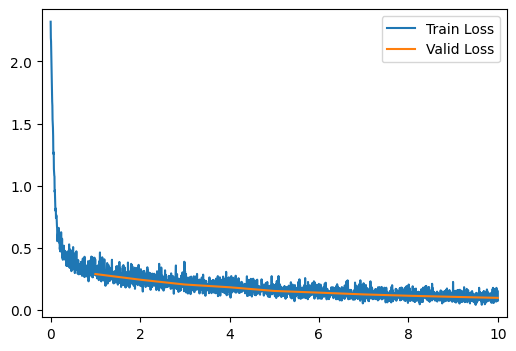
get_output_and_loss = autoencoder_output_and_maeloss# MSE or MAE
run_model(data_path, ae_model, learning_rate=0.003, get_output_and_loss=get_output_and_loss)
[ 1/10] Train Loss = 0.2845; Valid Loss = 0.2249; Valid Accuracy = 0.0%
[ 2/10] Train Loss = 0.2105; Valid Loss = 0.1970; Valid Accuracy = 0.0%
[ 3/10] Train Loss = 0.1920; Valid Loss = 0.1872; Valid Accuracy = 0.0%
[ 4/10] Train Loss = 0.1821; Valid Loss = 0.1764; Valid Accuracy = 0.0%
[ 5/10] Train Loss = 0.1754; Valid Loss = 0.1740; Valid Accuracy = 0.0%
[ 6/10] Train Loss = 0.1704; Valid Loss = 0.1657; Valid Accuracy = 0.0%
[ 7/10] Train Loss = 0.1661; Valid Loss = 0.1655; Valid Accuracy = 0.0%
[ 8/10] Train Loss = 0.1627; Valid Loss = 0.1630; Valid Accuracy = 0.0%
[ 9/10] Train Loss = 0.1600; Valid Loss = 0.1596; Valid Accuracy = 0.0%
[10/10] Train Loss = 0.1570; Valid Loss = 0.1560; Valid Accuracy = 0.0%
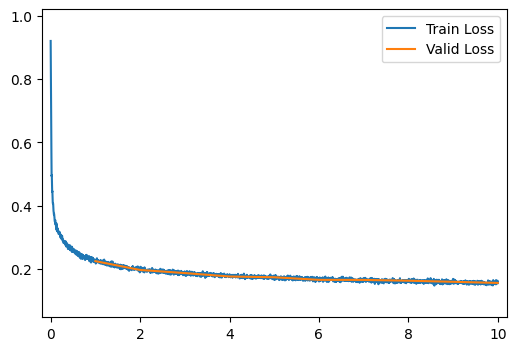
[10/10] Train Loss = 0.1570; Valid Loss = 0.1560; Valid Accuracy = 0.0%And we can see what our trained reconstructions look like!
output = ae_model(images)
# Convert to numpy
output = output.detach().numpy()
# Create the axes for our plots
f, ax = plt.subplots(4, 2, figsize=(4, 8))
for r in range(4):
ax[r, 0].imshow(images[r][0], cmap='Greys_r')
ax[r, 0].set_title('Image')
ax[r, 0].axis('off')
ax[r, 1].imshow(output[r][0], cmap='Greys_r')
ax[r, 1].set_title('Reconstruction')
ax[r, 1].axis('off')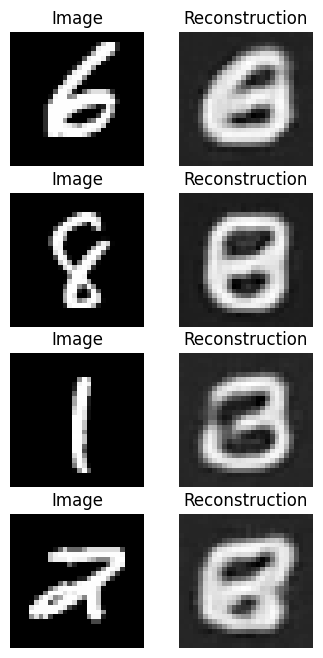
Q15
Run the above training code with both the MSE and MAE losses. (You’ll also need to re-run any cells that setup the network in order to re-initialize the weights).
Which loss gave better results from your perscpective? Give an explanation for why the chosen loss produced better results.
Answer
Mean absolute error produced better looking results due to the reduced sensitivity to outliers.
The results will depend on exactly how you modified the networks before, but they probably don’t look great! Ideally our reconstructions would look a lot like our original images.
Q16
In the cell below, modify the architecture of your encoder and decoder networks to improve the performance.
Think about what prevents reconstructions from being good and how you might loosen any restrictions that affect this performance. Don’t forget the goals of an autoencoder as you do this. The ideal solution should be a balance between compression and reconstruction performance.
Answer
encoder = nn.Sequential(
nn.Conv2d(1, 16, kernel_size=3, padding='same'),
nn.Tanh(),
nn.Conv2d(16, 16, kernel_size=3, padding='same'),
nn.Tanh(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Conv2d(16, 16, kernel_size=5, padding='valid'),
nn.Tanh(),
nn.Conv2d(16, 16, kernel_size=3, padding='same'),
nn.Tanh(),
nn.AvgPool2d(kernel_size=2, stride=2),
nn.Flatten(),
nn.Linear(16 * 5 * 5, 160),
nn.Tanh(),
nn.Linear(160, 120),
nn.Tanh(),
nn.Linear(120, 80)
)
decoder = nn.Sequential(
nn.Linear(80, 120),
nn.Tanh(),
nn.Linear(120, 160),
nn.Tanh(),
nn.Linear(160, 16 * 5 * 5),
nn.Tanh(),
nn.Unflatten(1, (16, 5, 5)),
nn.Upsample(scale_factor=2, mode='nearest'),
nn.ConvTranspose2d(16,16, kernel_size=3, padding=1),
nn.Tanh(),
nn.ConvTranspose2d(16,16, kernel_size=5, padding=0),
nn.Tanh(),
nn.Upsample(scale_factor=2, mode='nearest'),
nn.ConvTranspose2d(16, 16, kernel_size=3, padding=1),
nn.Tanh(),
nn.ConvTranspose2d(16, 1, kernel_size=3, padding=1),
)
ae_model = Autoencoder(encoder, decoder)
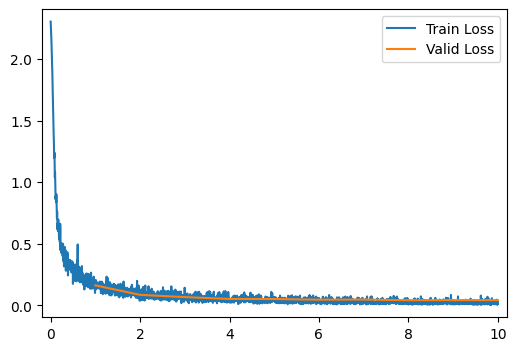
run_model(data_path, ae_model, learning_rate=0.003, get_output_and_loss=autoencoder_output_and_maeloss)
[ 1/10] Train Loss = 0.2417; Valid Loss = 0.1286; Valid Accuracy = 0.0%
[ 2/10] Train Loss = 0.1115; Valid Loss = 0.1018; Valid Accuracy = 0.0%
[ 3/10] Train Loss = 0.0921; Valid Loss = 0.0855; Valid Accuracy = 0.0%
[ 4/10] Train Loss = 0.0830; Valid Loss = 0.0804; Valid Accuracy = 0.0%
[ 5/10] Train Loss = 0.0783; Valid Loss = 0.0745; Valid Accuracy = 0.0%
[ 6/10] Train Loss = 0.0774; Valid Loss = 0.0818; Valid Accuracy = 0.0%
[ 7/10] Train Loss = 0.0760; Valid Loss = 0.0738; Valid Accuracy = 0.0%
[ 8/10] Train Loss = 0.0714; Valid Loss = 0.0664; Valid Accuracy = 0.0%
[ 9/10] Train Loss = 0.0654; Valid Loss = 0.0636; Valid Accuracy = 0.0%
[10/10] Train Loss = 0.0645; Valid Loss = 0.0623; Valid Accuracy = 0.0%
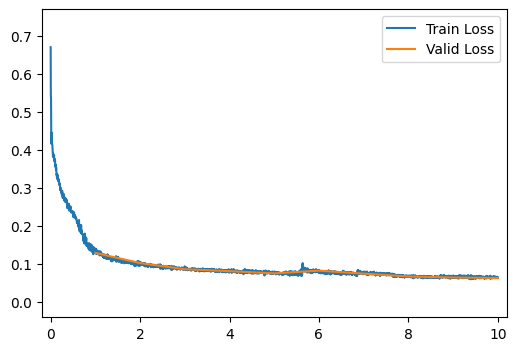
[10/10] Train Loss = 0.0645; Valid Loss = 0.0623; Valid Accuracy = 0.0%Now we can see what our trained reconstructions look like.
output = ae_model(images)
# Convert to numpy
output = output.detach().numpy()
# Create the axes for our plots
f, ax = plt.subplots(4, 2, figsize=(4, 8))
for r in range(4):
ax[r, 0].imshow(images[r][0], cmap='Greys_r')
ax[r, 0].set_title('Image')
ax[r, 0].axis('off')
ax[r, 1].imshow(output[r][0], cmap='Greys_r')
ax[r, 1].set_title('Reconstruction')
ax[r, 1].axis('off')
Let’s now consider some neat things we can do with our autoencoder model! We’ll start with image interpolation, that is, lets try to smoothly transition from one image to another.
An easy standard for interpolation is linear interpolation. If we want to find intermediates between starting and ending values, \(x^{(0)}\) and \(x^{(1)}\), we’ll assing intermediate value \(x^{(t)}\) for \(t\in[0, 1]\) as:
\[x^{(t)} = t\cdot x^{(1)} + (1-t)\cdot x^{(0)}\]
We can do this pixel-by-pixel to transition from one image to another as shown below!
image_0 = images[2, 0] # Select image 0 and remove unused channel dimension
image_1 = images[1, 0] # Same for second image
f, ax = plt.subplots(1, 10, figsize=(15, 1.5))
for i, t in enumerate(np.linspace(0, 1, 10)):
# Perform the interpolation and show each intermediate result.
image_t = t * image_1 + (1 - t) * image_0
ax[i].imshow(image_t, cmap='Greys_r')
We can see that, while this works, it’s a bit unsatisfying. One image “ghosts” into another rather than reshaping as we might desire. Let’s see if our autoencoder can help! Instead of interpolating pixels, let’s try interpolating our compressed representations. In this case, we’ll use the following interpolation:
\[\mathbf{x}^{(t)} = \text{decoder}\big( t\cdot \text{encoder}(\mathbf{x}^{(1)}) + (1-t)\cdot \text{encoder}( \mathbf{x}^{(0)})\big)\]
Q17
Modify the interpolation code to use interpolation in the “latent” compressed representation as shown above.
image_0 = images[2, 0] # Select image 0 and remove unused channel dimension
image_1 = images[1, 0] # Same for second image
f, ax = plt.subplots(1, 10, figsize=(15, 1.5))
for i, t in enumerate(np.linspace(0, 1, 10)):
# Perform the interpolation and show each intermediate result.
image_t = ae_model.decoder(t * ae_model.encoder(image_1.unsqueeze(0).unsqueeze(0)) + (1 - t) * ae_model.encoder(image_0.unsqueeze(0).unsqueeze(0)))[0][0].detach().numpy()
ax[i].imshow(image_t, cmap='Greys_r')
What do you notice about the output here?
The autoencoder-based interpolation does a better job than the pixel-based interpolation.